|
|
|
|
|
|
|
|
|
Génération et propagation ultrasonore appliquée au CND |
| Plan du chapitre 3 - "Traducteurs ultrasonores" : |
| 3 - Traducteurs ultrasonores 3.1 - Le phénomène piézoélectrique 3.1a - Propriétés de céramiques piézoélectrique 3.1b - Le couplage électromécanique 3.2 - Génération des ondes ultrasonores 3.2a - Traducteur ultrasonore 3.2b - Modélisation d'un transducteur à ultrasons 3.3 - Matériaux piézocomposites |
3.4 - Caractéristiques
du rayonnement des traducteurs à ultrasons
3.4a - Traducteurs plans 3.4b - Traducteurs focalisés 3.5 - Traducteurs multiéléments 3.5a - Balayage électronique par commutation 3.5b - Balayage sectoriel et volumique 3.5c - Retournement temporel |
|
|
3.5 - Traducteurs multiéléments |
| La technique multiéléments repose
sur le principe de segmentation d'une surface active en un réseau d'émetteurs.
Sur le même principe qu'un réseau SONAR, la variation de la phase
à l'émission ou à la réception, d'un élément
à l'autre, permet de modifier la directivité du faisceau émis
ou reçu. Les premières applications ont été réalisées
dans le secteur médical vers la fins des années 1950. L'utilisation
d'un tel dispositif implique un traitement des données ainsi qu'une
acquisition multivoies, ce qui était très difficile à réaliser
avec des techniques analogiques. Grâce aux progrès en traitement
numérique des données, on est en mesure de réaliser des systèmes
capables de gérer plusieurs voies simultanément et en temps réel.
Par ailleurs, la réalisation des capteurs en céramique piézoélectrique
a longtemps posé des problèmes de couplage acoustique entre les
éléments du réseau, dus à la propagation des modes latéraux
(diaphonie acoustique). Ceux-ci peuvent en partie être résolus
grâce à des techniques de fabrication particulière des céramiques
piézoélectriques comme le piézocomposite 1-3.
|
|
|
3.5a - Balayage électronique par commutation
|
|
 |
|
|
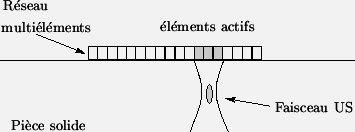
Figure 10 : Schéma du
fonctionnement d'un traducteur multiéléments par commutation.
|
|
|
On peut créer un balayage électronique en activant chaque élément tour à tour. Ainsi le découpage de la partie active d'un traducteur peut être utilisée de façon à détecter des défauts situés sous chaque élément. Cette technique permet de réaliser des acquisitions à grande vitesse pour la détection des défauts. |
|
3.5b - Balayage sectoriel et volumique |
|
 |
|
|
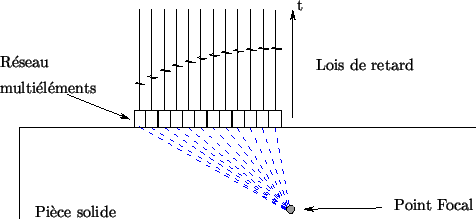
Figure 11 : Principe de fonctionnement
d'un traducteurs multiéléments
|
|
| Comme on utilise plutôt des traducteurs à large bande fréquentielle, on préfère parler de lois retard que de lois de phase. Le principe d'une loi de retards est illustré figure 11. Un traducteur multiéléments est composé de plusieurs éléments émetteurs (et récepteurs) pouvant fonctionner indépendamment les uns des autres. De cette façon, il est possible de construire un faisceau avec une incidence choisie par déviation angulaire. En faisant varier ces paramètres en temps réel au cours du contrôle, on peut réaliser un balayage angulaire : le traducteur reste fixé en une position et plusieurs tirs sont effectués à des incidences différentes afin de couvrir la zone d'intérêt. On peut utiliser cette technique afin que chaque élément émette un signal arrivant en phase à un point focal choisi par l'utilisateur. De cette façon, il est aussi possible de contrôler le faisceau pour une focalisation en plusieurs profondeurs. Cette technique permet, en plus de la détection, le positionnement voire le dimensionnement d'un défaut. |
|
3.5c - Retournement temporel |
 |
|
|
L'inspection de milieux inhomogènes pose des problèmes dans de nombreux cas de contrôle ultrasonore. Le milieu inspecté peut être composé de matériaux ayant différentes vitesses, provoquant des aberrations de phase et des distorsions du faisceau ultrasonore. Ce problème a été principalement étudié en imagerie médicale ; en particulier les travaux de M. Fink concernant le retournement temporel [14] ont permis de mettre au point une méthode d'auto-focalisation sans la connaissance a priori du milieu propagateur. Cette technique a d'abord été mise en place pour des applications médicales comme le traitement par lithotritie. Le principe est illustré figure 12 : une cible est insonifiée sans focalisation particulière à travers un milieu aberrateur ; la cible renvoie une onde divergente dont le signal est enregistré par les émetteurs ; le signal enregistré est inversé temporellement, puis re-émis de façon à ce que l'onde converge vers la cible. |
|
| D'autres travaux réalisés à ce propos ont permis d'améliorer cette technique en appliquant plusieurs fois le processus décrit ci-dessus. A chaque itération, la cible est mieux insonifiée, améliorant encore sa réponse ; le signal à inverser est donc plus apte à atteindre la cible [15]. Cette technique a aussi été appliquée au CND par ultrasons pour l'amélioration de la détection d'inclusions «hard-alpha» dans les billettes de Titane [16]. | |
|
|
|
Page Précédente - Matériaux composites - Page suivante - CND par ultrasons |
| Imprimer la page |
|
|